I got a 100-sized helicopter (electric) recently and was going to use it to try aerial imaging and/or FPV after I got this awesome little dice cam that takes HD movies onto a microSD card. This thing also has 4 infrared lights for any dark time videos. It is essentially a 1 inch cube. I got mine at HobbyPartz. I then decided I want to try another platform and instead of going for a quad copter, I thought I would try a tri-copter. Just for goofs, I wanted to challenge myself and go for ducted fans for thrust. I know they are not that efficient, but I wanted bladeless testing vehicle for close quarters at first. I wanted to get the mixing and gyro integration experimented with first before deciding on the final platform. The key for this project is light and less than a foot overall diameter. First I am testing this platform out with 30mm ducted fans which are ridiculously light and the thrust on paper not bad for its size. They are the AEO fans from China.

For yaw control, I looked high and low for a good rotating connector and came up with a floppy drive stepper which has smooth rotation and a long spiral shaft which was perfect for jamming and gluing into center of balsa support. Control drive would be a a small 9g servo.
Now comes the real crucial part of this vehicle – control and balance. I don’t think I will be content with a 6 channel receiver hooked up to the electronic speed controllers, let alone the balance issue because it is not a quad copter. I actually got an Ardupilot Legacy to incorporate into the design, and I probably should have gone with a newer mega version, but currently there was a 2-3 week wait unless I wanted a completely built one that had an IMU attached for considerably more money. I got it and soldered all the headers in place and wired the jumpers on the reverse side for the extra channels. So I end up with having to integrate an IMU into it somehow. My current choices: Arduino Nano 3.0, Ardupilot Legacy, and an Arbotix board. The Arbotix has an ATMega644p and the other two have a 328p – not quite ‘mega’ but more than the 328p of the others on hand. I decided to challenge myself and go the with Arbotix to start on this prototype.
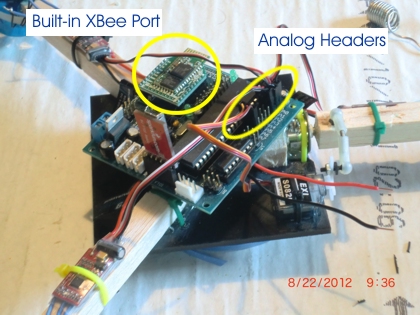
As you can see above, this board has plenty of I/O and the bonus of an XBee port (essentially a shield) which opens up telemetry options and possible replacement of 2.4Ghz receiver altogether.
So the challenge will be incorporating either one IMU or multiple IMU devices. With the Ardupilot I was planning on getting a GPS unit, but now I may just get a compass module which will work in concert with the gyros and accelerometers. I’m not looking for waypoint capability or autopilot at this time, so stabilizing the pitch, roll, amd yaw will be sufficient. My general plan for configuration goes something like this: Use the Arbotix as a base for the components, where the ESC cables plug into 3 analog headers and the final mixing and distribution takes place in the sketch after it comes from the 2.4Ghz receiver channels. I will have a mini breadboard that will hold the IMUs and have output from them feed into the Arbotix. Gyro and accelerometer feedback will be processed by ATMega and fed back out to ‘correct’ the ESC and motors.