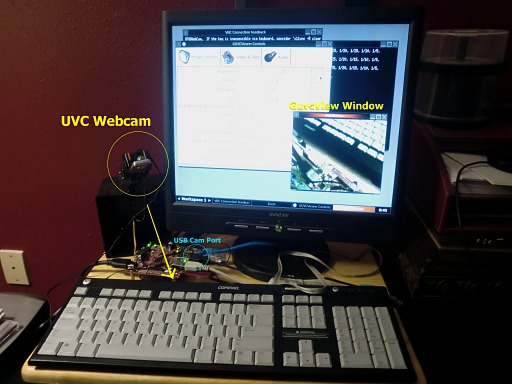
Things are just falling into place with this Beagleboard. The Ubuntu distro, although slow on installing packages is pretty damn robust. I have installed a bunch of packages without a hiccup. X11VNC works without any issues, and can access with ultraVNC without much screen lag. My UVC webcam (which can be seen in motion in earlier posts) works perfectly due to great kernel library and UVC driver that was already in distro. I added extras like “gUVCView“, which is an awesome webcam app. I have installed “motion” and “UVCCapture” as well. The goal is getting OpenCV on here and getting some video recognition algorithms going. From what I have seen with Beagleboard, I have no worries. The video pipeline on this board is pretty spectacular. There is even a camera header installed on board for those ‘board cams’ which have 15-18 wires connecting them. I will be boning up on my Python and then OpenCV will be a big chunk of my robot ‘to do’ list.
You can see below the beagleboard and the future enclosure body (torso) with the camera head aimed at the keyboard. It actually defaults to 640×480 and I reduced the size in the .guvcviewrc file (found in user directory) to 320×200. For my testing and vision processing experiments, this quarter-vga format will be fine to cut my teeth on.